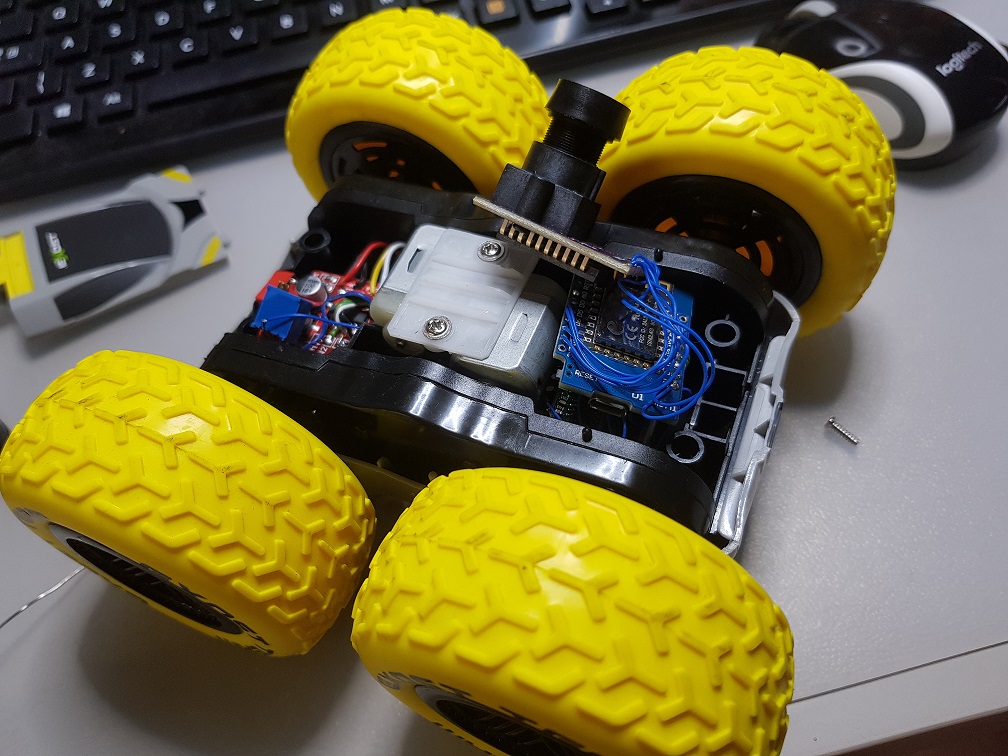
As I've mentioned in the last blog post, I was trying to build a four wheel drive robot using arduino that utilizes two A3080 mouse sensors for odometry. Sadly that project never got finished and I disassembled the robot and built a balancing robot instead. However later I decided to not abandon the four wheel drive …
Read More